Controllo rottura utensili


BK MIKRO
- BK MIKRO9
- Il sistema
- Funzione
- Testine di scansione
- Unità di controllo
- Software
- Rottura utensili
- Controllo pezzi
- Controllo forme
- Accessori

- Altri sistemi
Distributore esclusivo Italia:
![]()
Balluff Automation S.R.L.
Esempi applicativi monitoraggio rottura utensili
Esempi applicativi
Cliccare su un’immagine per visualizzarla nelle sue dimensioni originali (è necessario JavaScript).
 Monitoraggio rottura utensili bilaterale nello spazio di lavorazione |
 Controllo rottura utensili inversione di rotazione |
 Monitoraggio rottura utensili sotto l’azione dei trucioli Monitoraggio rottura utensili sotto l’azione dei trucioli |
 Controllo rottura utensili con più testine di scansione |
 Riequipaggiamento di un centro di lavoro con un sistema di monitoraggio della rottura degli utensili |
 Controllo rottura utensili nel magazzino di un centro di lavoro, ago di scansione protetto meccanicamente |
 Monitoraggio rottura utensili nell’area di lavoro sotto l’azione di un refrigerante |
 Controllo rottura utensili nel magazzino di un centro di lavoro |
 Monitoraggio rottura utensili sulla punta degli utensili nel magazzino di un centro di lavoro |
Funzionamento del controllo rottura utensili
L’ago si sposta verso sinistra o destra fino a raggiungere l’utensile. Durante questa operazione inizialmente esso arriva all’utensile alla velocità massima possibile, quindi rallenta ed effettua la scansione dell’utensile con l’intensità impostata. Al rilevamento di un arresto dell’ago (riscontro di un oggetto) o al superamento dell’estremità dell’area di monitoraggio (ad esempio rottura utensile), il senso di rotazione cambia immediatamente, l’ago ritorna alla velocità massima alla posizione iniziale ed invia un messaggio OK o KO.
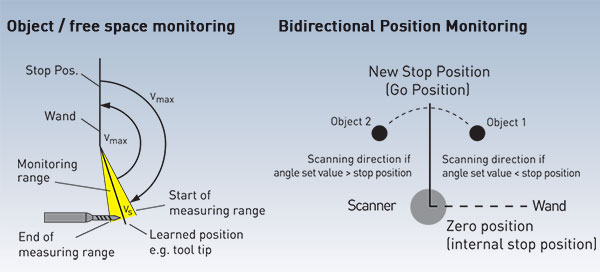
Per la scansione bilaterale si può assegnare all’ago una posizione iniziale liberamente definibile fra due utensili. Una volta che l’ago ha raggiunto questa posizione, entrambi gli utensili possono essere sottoposti a scansione. Anche la sequenza della direzione di scansione è selezionabile.
